![]() Before learning how to use a VFD, one must first understand what it is and what purpose the control serves within an application.
Before learning how to use a VFD, one must first understand what it is and what purpose the control serves within an application.
PART 1: What is an AC Motor Speed Control?
An AC motor speed control—also known as a variable frequency drive, adjustable frequency drive, variable speed drive, adjustable speed drive and AC inverter—is an electro-mechanical object that can be used to change the output speed of an AC motor by adjusting the input frequency into the motor.
Speed adjustments can easily be made by using a variable frequency drive (VFD) with an AC motor, and are the most common reason for using them. VFDs allow the minimum and maximum speeds an application is running at to be adjusted, soft starts and stops to be implemented, and compensate for speed variation due to slip. However, there are other benefits that can come from using an AC motor speed control.
Groschopp AC motor drives provide an energy savings to the user, protect the motor from current overloads, and extend the life of the motor.
PART 2: Changing the Speed of an AC Motor
For AC motors, there are three factors that can alter a motor’s speed: number of poles, frequency, and load. Each factor will be discussed throughout this section.
Magnetic Poles and Motor Speed
AC motors have magnetic poles as part of their construction, meaning the motor pole (and therefore speed) cannot change after they are built. A 2-pole motor with a frequency of 60Hz will have synchronous speeds of approximately 3600 rpm, but a 4-pole motor with the same frequency will only have synchronous speeds of 1800 rpm. These speeds will remain relatively consistent regardless of the application’s torque.
Input Frequency and Motor Speed
A second way to alter the speed of an AC motor is by changing the frequency at which the motor is run. For example, motors operating off standard power in the United States operate on an input power frequency of 60Hz, but a European country uses 50Hz.
If the motor is not designed to run on the necessary frequency provided, it is not recommended to simply change the frequency of the motor, as that could cause several issues including overheating and loss of power. VFDs can be used to control AC motor speeds by changing the motor’s frequency without sacrificing the output power of the motor. This is done by turning the speed pot (explained in section three) of an AC motor drive.
Visit the blog “What’s Your Frequency” for additional information regarding motor frequencies.
Application Load and Motor Speed
When choosing a VFD to use with a motor, the right selection will depend on the operating load requirement of the application. The higher the load—and therefore more torque—needed in an application, the higher the current draw of the motor will be. Since VFDs are rated by their continuous output current (amps), it is important to select a drive with adequate current available to the motor for optimal performance.
There are three categories of load to take into consideration: constant torque, variable torque, and constant power.
Constant Torque Load – The torque remains the same regardless of speed. Doubled speed equals doubled power required. Think conveyors and mixers.
Variable Torque Load – The torque increases as the speed increases. Doubled speed equals more than double power required. Think pumps and fans.
Constant Power Load – Torque decreases as the speed increases. Doubled speed equals unchanged power required. Think grinders and saws.
The following diagram provides a visual comparison of these load categories using a Groschopp AC right angle gear motor as an example. The formula for calculating these values can be found in the “What is Horsepower” blog. If the load is a constant power load, the motor used in the example will work. If it is dependent on the other load types, the motor will not have enough power to operate correctly. A higher power motor with a correctly-sized VFD would be needed to handle these increased power loads.

PART 3: Adjusting a VFD
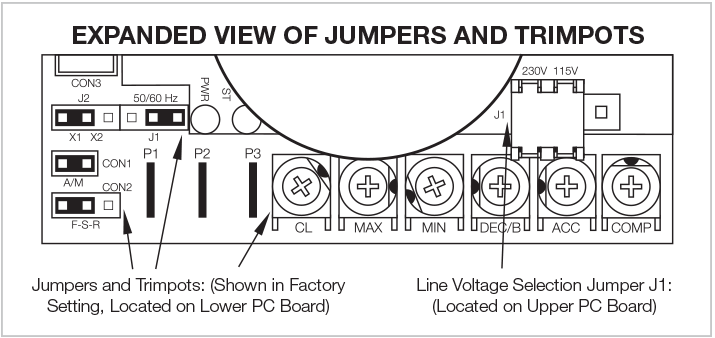
In order to better understand the options available for controlling an AC motor’s performance, it is important to first learn the anatomy of a motor speed controller. The following diagram depicts the knobs and switches (jumpers and trimpots) that can be found on Groschopp’s VFDs. Not all controls will look identical inside, but this diagram should provide a point of reference for other controls.
Adjusting Jumpers
J1 (upper board) – 230V/115V – This jumper allows you to switch between 230 and 115 VAC input voltage. It comes preset to 230V.
Using a motor controller allows you to run a 230V three phase motor on 115V power resulting in a more reliable motor with much higher starting torque.
J1 (lower board) – 50/60Hz – This jumper allows you to switch between 50Hz and 60Hz rated motors. It comes preset to 60Hz.
The input to the drive can handle 50Hz or 60Hz, regardless of what frequency the jumper is set to. This purpose of this jumper is to change between a 50Hz or a 60Hz rated motor. For Groschopp and other American-made motors, this jumper is already accurately set to 60Hz, and likely won’t often be used.
J2 (lower board) – 2x RPM – This jumper allows the motor to spin up to twice its rated speed. It comes preset to 1x. If J2 is set to 2x, then the motor will have constant HP above the rated speed.
For applications that need a higher speed than what their motor currently offers, but that can’t afford to reduce the torque or power of the motor, a VFD is an optimal solution. As long as the motors are capable of handling the higher speed—Groschopp motors are—a control can be used to make the necessary adjustments.
CON1 – A/M – This jumper switches between automatic and manual start. It comes preset to automatic start. With automatic start, the drive will begin operating the motor automatically if power is applied. It will also restart automatically after a fault (under-current, over-current, short circuit). With the manual start option, a supplied 2-wire connector is put on the pins instead of the jumper. The 2-wire connector should be wired to a momentary switch. The drive will not run automatically when powered up; it will only run when the switch is closed. Similarly, the drive will not automatically restart after a fault, the switch must be manually closed.
The manual mode can be used for situations where safety is a concern. For example, applications that can get jammed should use the manual reset so the motor doesn’t automatically start before it is safe to operate.
CON2 F-S-R – Forward-Stop-Reverse – These pins allow a switch to be added to change the direction of rotation of the motor. A 3-way switch can be used to do this. These pins can be used to enable/disable the motor.
The forward-stop-reverse switch allows the power to remain connected to the control but the control doesn’t power the motor. By using this, the control can still communicate with a programmable logic controller (PLC) without giving power to the motor. This switch also eliminates the need for using relays, which can be bigger and more expensive than the F-S-R switch.
Adjusting Trimpots
CL – Current limit – This sets the current limit and restricts the maximum current to the motor using an I2t method to prevent motor overload and nuisance tripping. Controls come set to 160% of the control’s rated current. If the motor current rating differs from the control current rating, the CL should be set to 160% of the motor current rating.
If the motor draws too much current, it will trip to protect the motor. If the CON1, mentioned previously, is set to “manual,” the current limit must be manually reset for the motor to begin running again. This can be done by powering down and restarting the system.
MAX – Maximum Speed – This is factory set to 100% of the frequency setting. Turning this pot CCW limits the maximum speed to a lower speed. Turning this pot CW limits the maximum speed to a higher speed.
The MAX speed pot can be set from 70% to 110% of the frequency setting of the drive (50Hz, 60Hz, or if the 2x jumper is set 100Hz or 120Hz). A typical speed range of 10% to 200% can be set with Groschopp’s AC motor and control combination while still maintaining torque and good speed regulation.
MIN – Minimum Speed – This is factory set to 0% of the frequency setting. Turning this pot CCW limits the minimum speed to a lower speed. Turning this pot CW limits the minimum speed to a higher speed.
Rather than using a gearbox with a custom ratio to hit really low speeds, a control can be used. It is important to note that operating an AC motor at really slow speeds—typically below 10% of the rated speed—decreases the ability to regulate speed, and the rated torque of the motor also decreases.
DEC/B – Deceleration – Sets the amount of time it takes for the motor to decelerate from full speed to zero speed. This is factory set to 1.5 seconds and can be increased by turning CW and decreased by turning CCW. For high inertial loads, it is recommended that the deceleration time be increased.
For some applications such as conveyors or material handling equipment, using a motor with a gradual stop is needed to prevent damage to both the motor and the materials.
ACC – Acceleration – Sets the amount of time it takes for the motor to accelerate from zero speed to full speed. This is factory set to 1.5 seconds and can be increased by turning CW and decreased by turning CCW. Rapid acceleration could cause the current limit circuit to activate.
Using a slightly longer startup time can increase the life of the motor because it is exposed to less current each time it needs to accelerate to full speed. This is especially true with intermittent duty applications that are frequently starting and stopping.
COMP – Slip compensation – All AC induction motors will decrease in speed as torque is applied. This decrease in speed is called “slip.” The slip compensation can be adjusted to give better speed regulation under load.
Slip compensation is an important feature for applications that need a consistent speed but have varying loads. With the use of a control, the motor will operate at its rated speed no matter what load is applied.
Adjusting LED’s
PWR – Power On LED – This LED will turn green when AC power is applied to the AC line inputs. This is useful for checking if the control is powered on or not.
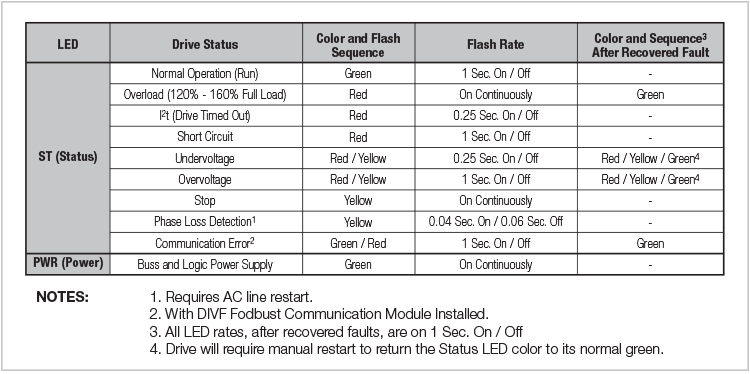
ST – Status LED – This LED has 3 colors that provide information about faults or abnormal conditions. This is useful for troubleshooting. It also provides a signal to let the user know that the drive is functioning normally. Following is a chart that lists each of the possible LED status conditions.